sandbox/fpicella/test/couette_torque.c
Couette flow between rotating cylinders + torque computation
This case is a straight derivation of Stephane’s couette.
When computing forces (and torques!) on an embedded boundary, a common assumption is that velocity \mathbf{u} on the embedded interface is homogeneous, hence \mathbf{\nabla} \mathbf{u} \cdot \mathbf{t} = \mathbf{0} (see function embed_color_force and embed_color_torque from Arthur’s myembed.h).
This is not true if there is a tangential velocity component, such as, for the case of a rigid rotation (see derivation here).
Here we propose a simple test case, for the computation of torque on embedded boundaries having non-zero angular velocity: we test embedded boundaries by solving the (Stokes) Couette flow between two rotating cylinders.
We compare torques computed with our implementation with the one proposed in myembed.h
#include "grid/quadtree.h"
#include "ghigo/src/myembed.h"
#include "fpicella/src/compute_embed_color_force_torque_RBM.h"
#include "navier-stokes/centered.h"
#include "view.h"‘color’ fields
These cs/fs fields are used to “mark” the outer and inner cylinder.
FILE * torque_output_file; // global file pointer
int main()
{Space and time are dimensionless. This is necessary to be able to use the ‘mu = fm’ trick.
size (1. [0]);
DT = 1. [0];
origin (-L0/2., -L0/2.);
stokes = true;
TOLERANCE = 1e-5;
torque_output_file = fopen ("couette_torque.dat", "w");
for (N = 16; N <= 256; N *= 2)
run();
fclose(torque_output_file);
}
scalar un[];
#define WIDTH 0.5
event init (t = 0) {The viscosity is unity.
mu = fm;The geometry of the embedded boundary is defined as two cylinders of radii 0.5 and 0.25.
solid (cs, fs, difference (sq(0.5) - sq(x) - sq(y),
sq(0.25) - sq(x) - sq(y)));The outer cylinder is fixed and the inner cylinder is rotating with an angular velocity unity.
u.n[embed] = dirichlet (x*x + y*y > 0.14 ? 0. : - y);
u.t[embed] = dirichlet (x*x + y*y > 0.14 ? 0. : x);
// Inner cylinder has angular velocity +1, outer cylinder is held fixed.We initialize the reference velocity field.
foreach()
un[] = u.y[];
}Torque on a ROTATING embedded body.
We compute the torques on the OUTER and INNER cylinder using:
First, we compute the “colors”, marking the different cylinders.
scalar csOUTER[];
scalar csINNER[];
face vector fsOUTER[];
face vector fsINNER[];
solid (csOUTER, fsOUTER, sq(0.5) - sq(x) - sq(y));
solid (csINNER, fsINNER, + sq(x) + sq(y) - sq(0.25));
// allocate some auxiliary variables
coord Tp, Tmu;
coord center = {0.,0.,0.};
coord OmegaINNER = {1.,1.,1.}; // for the moment, it works ONLY in 2D!
coord OmegaOUTER = {0.,0.,0.}; // for the moment, it works ONLY in 2D!
double rINNER = 0.25; // radius of the inner cylinder
double rOUTER = 0.5; // radius of the outer cylinder
// compute torques numerically
// using ghigo/myembed.h functions
embed_color_torque (p, u, mu, csOUTER, center, &Tp, &Tmu); // standard src/embed.h like approach
double T_embed_OUTER = Tp.x + Tmu.x;
embed_color_torque (p, u, mu, csINNER, center, &Tp, &Tmu); // standard src/embed.h like approach
double T_embed_INNER = Tp.x + Tmu.x;
// using fpicella's RBM function (accounting for rotating rigif boundary)
embed_color_torque_RBM (p, u, mu, csOUTER, center, OmegaOUTER, rOUTER, &Tp, &Tmu);
double T_embed_RBM_OUTER = Tp.x + Tmu.x;
embed_color_torque_RBM (p, u, mu, csINNER, center, OmegaINNER, rINNER, &Tp, &Tmu);
double T_embed_RBM_INNER = Tp.x + Tmu.x;
// compute torques, analytically
double nu = 1.; // viscosity;
double T_ana_INNER = - 4*nu*M_PI*(OmegaINNER.x-OmegaOUTER.x)/(pow(rINNER,-2) - pow(rOUTER,-2));
double T_ana_OUTER = -T_ana_INNER;
fprintf(torque_output_file,
"%04d %+6.5e %+6.5e %+6.5e %+6.5e %+6.5e %+6.5e\n",
N,
T_ana_INNER, T_ana_OUTER,
T_embed_INNER, T_embed_OUTER,
T_embed_RBM_INNER, T_embed_RBM_OUTER);
fflush(torque_output_file);
}We look for a stationary solution.
event logfile (t += 0.01; i <= 1000) {
double du = change (u.y, un);
if (i > 0 && du < 1e-6){
event("compute_torque"); // so to compute torques only at convergence.
return 1; /* stop */
}
}We compute error norms and display the angular velocity, pressure and error fields using bview.
#define powerlaw(r,N) (r*(pow(0.5/r, 2./N) - 1.)/(pow(0.5/0.25, 2./N) - 1.))
event profile (t = end)
{
scalar utheta[], e[];
foreach() {
double theta = atan2(y, x), r = sqrt(x*x + y*y);
if (cs[] > 0.) {
utheta[] = - sin(theta)*u.x[] + cos(theta)*u.y[];
e[] = utheta[] - powerlaw (r, 1.);
}
else
e[] = p[] = utheta[] = nodata;
}
norm n = normf (e);
fprintf (stderr, "%d %.3g %.3g %.3g %d %d %d %d %d\n",
N, n.avg, n.rms, n.max, i, mgp.i, mgp.nrelax, mgu.i, mgu.nrelax);
dump();
draw_vof ("cs", "fs", filled = -1, fc = {1,1,1});
squares ("utheta", spread = -1);
save ("utheta.png");
draw_vof ("cs", "fs", filled = -1, fc = {1,1,1});
squares ("p", spread = -1);
save ("p.png");
draw_vof ("cs", "fs", filled = -1, fc = {1,1,1});
squares ("e", spread = -1);
save ("e.png");
if (N == 32)
foreach() {
double theta = atan2(y, x), r = sqrt(x*x + y*y);
fprintf (stdout, "%g %g %g %g %g %g %g\n",
r, theta, u.x[], u.y[], p[], utheta[], e[]);
}
}Torques on both outer and inner cylinder.
At equilibrium, torques should be equal and opposite.
set xlabel 'N'
set ylabel 'T'
set grid
plot 'couette_torque.dat' u 1:2 w l t 'ana_INNER', 'couette_torque.dat' u 1:4 w l t 'embed_INNER', 'couette_torque.dat' u 1:6 w l t 'embed_RBM_INNER'
Torques (script)
Results
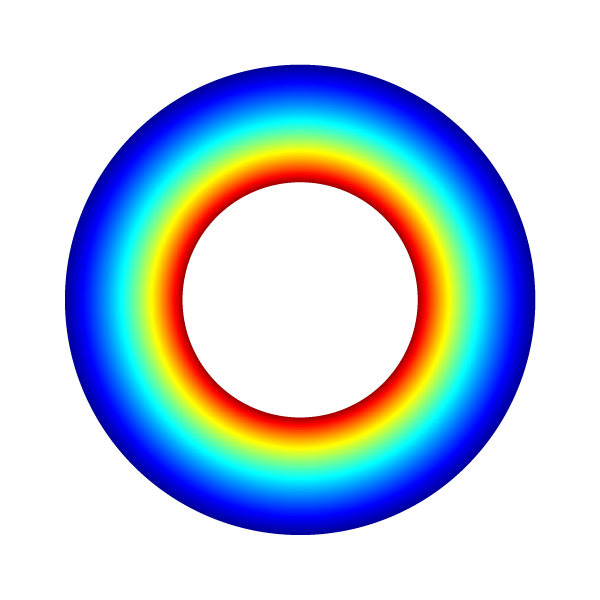
Angular velocity
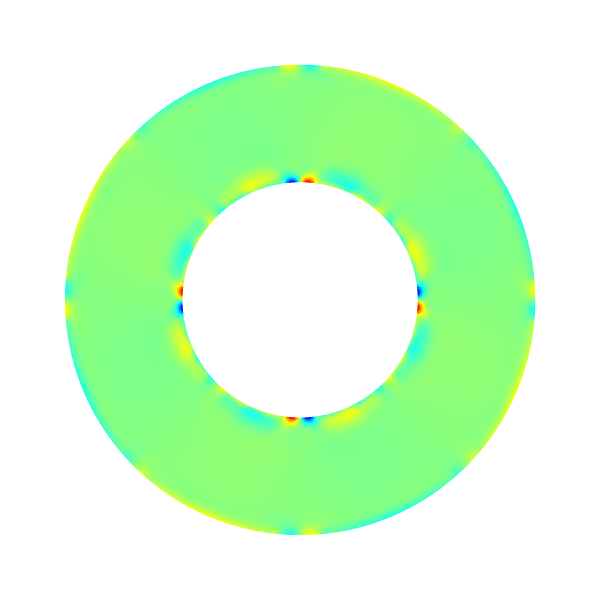
Pressure field
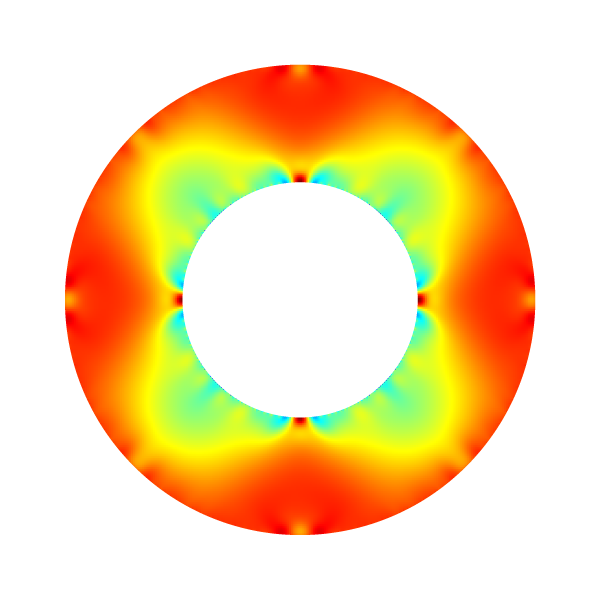
Error field
set xlabel 'r'
set ylabel 'u_theta'
powerlaw(r,N)=r*((0.5/r)**(2./N) - 1.)/((0.5/0.25)**(2./N) - 1.)
set grid
set arrow from 0.25, graph 0 to 0.25, graph 1 nohead
set arrow from 0.5, graph 0 to 0.5, graph 1 nohead
plot [0.2:0.55][-0.05:0.35]'out' u 1:6 t 'numerics', powerlaw(x,1.) t 'theory'
Velocity profile (N = 32) (script)
Convergence is close to second-order.
unset arrow
set xrange [*:*]
ftitle(a,b) = sprintf("%.3f/x^{%4.2f}", exp(a), -b)
f(x) = a + b*x
fit f(x) 'log' u (log($1)):(log($4)) via a,b
f2(x) = a2 + b2*x
fit f2(x) '' u (log($1)):(log($2)) via a2,b2
set xlabel 'Resolution'
set logscale
set xtics 8,2,1024
set ytics format "% .0e"
set grid ytics
set cbrange [1:2]
set xrange [8:512]
set ylabel 'Error'
set yrange [*:*]
set key top right
plot '' u 1:4 pt 6 t 'max', exp(f(log(x))) t ftitle(a,b), \
'' u 1:2 t 'avg', exp(f2(log(x))) t ftitle(a2,b2)
Error convergence (script)